
J'ai commencé mon aventure multicoptères avec mon projet de réaliser la Zorglumobile.
J'avais déjà essayé il y a très longtemps avec un quadicoptère jouet prévu pour voler en mode "+" et avec yn gyro mécanique, mais il était incapable de soulever la masse d'une quelconque carrosserie et encore moins d'une carrosserie de Zorglumobile à l'échelle de ses hélices.
J'ai découvert il y a déjà un certain temps (fin 2010 il me semble) la Gaui, un quadicoptère en kit équipé d'une stabilisation électronique qui marche bien.
Celle ci était assez chère (il n'y en avait pas d'autre dans la même gamme) , mais qui promettait enfin de pouvoir envisager sérieusement de construire une maquette de Zorglumobile.
J'ai vite fait de tenter quelques membres du club à en acheter aussi et on était 5 ou 6 à voler sur nos pistes du club.
ci dessus celle de Johanny
La mienne a vite été transformée en engin utilitaire :

voir la page sur la cloche de pâques.
J'ai donc appris assez vite à me débrouiller pour piloter cet engin, qui est assez facile du moins en stationnaire. (plus facile que mes hélicoptères taille 600 qui me font toujours un peu peur)
Par la suite il y a eu la FCwii.

La FCwii était la première carte (à monter sois même) qui permettait de réaliser un quadricoptère à moins de 100 euro avec des moteurs -contrôleurs chinois bon marchés et un "frame" en profilés d"alu du Bricotruc.
et c'est pour finir avec cette carte que j'ai pu faire les premiers vols de ma Zorglumobile.

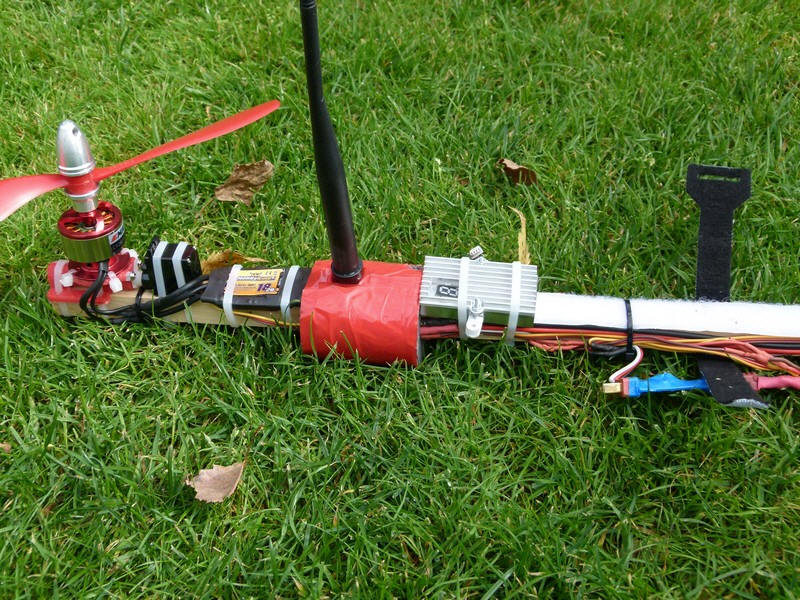
Ensuite diverses versions dont ce modèle équipé FPV.

Carte FCWii, pilotage en 2.4GHz, transmission vidéo en 1.2GHz et relais vers les lunettes en 5.8 GHz.
J'ai ensuite utilisé les cartes KK2 vendues chez HK :

Celui ci est mon quad d'acro avec lequel j'ai fait quelques flips et qui se débrouille très bien , même par grand vents et en vols de nuit.

Il est équipé d'une dérive expérimentale que j'ai abandonné depuis...

Ici un très petit quad équipé passe partout pour pouvoir entrer et sortir de la voiture par les fenêtres.
Pas terrible car il fait beaucoup de bruit et demande des 2S légers pour bien voler.
Le matériel sera prochainement recyclé (le projet est déjà dans le tiroir!)

Ci dessus un Scorpion Y6 (vendu en kit) qui est assez lourd mais qui vole comme bien un gros hélico (malheureusement pas sur le dos pour l'instant)
Il est équipé d'un système d'éclairage pour maquettes d'avion (avec strobbes, beacon etc.. du plus bel effet en vol de nuit.
Intéressant pour emporter du matériel photo/vidéo.

Ici bien sûr la zorglumobile...

Ce truc bizarre est une tentative de motorisation pour un projet de Zorgléoptère. la carte est réglée en bicoptère mais avec des modifs cars les turbines tournent dans le même sens.
Les quelques essais effectués ont été catastrophiques. Cette version de propulsion est définitivement abandonnée! Le projet de zorgléoptère ne l'est pas (j'ai encore quelques idées)!

Ci-dessus une photo de famille ;-))
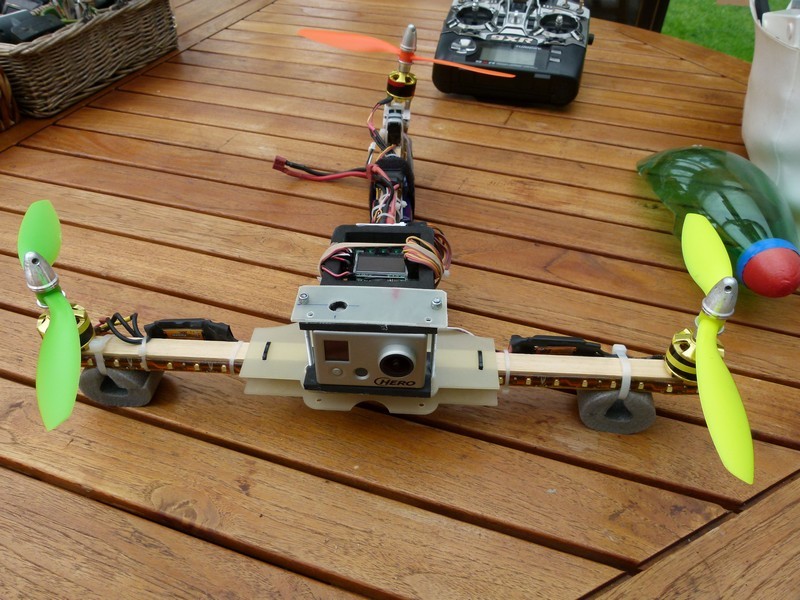
Le Tcopter :

Une des dernières créations : un Tcopter avec châssis en bois et époxy de CI. Le bois, c'est du ramin assez dur et léger qui est vendu avec les moulures dans les grandes surfaces de bricolage. L'époxy est fraisé dans des chutes de CI (fichiers disponibles)et l'assemblage se fait avec des colliers plastique ( dits Rislan ou Colson).



Les moteurs sont soit vissés au travers du bois, soit aussi fixés avec des Colsons (pour les moteurs avec un socle alu).
Le système d'articulation du rotor arrière est très ingénieux (je l'ai trouvé en fouinant sur le net) :

Un micro servo fixé au châssis bois par des collier, et deux pièces plastiques de train avant (vendus par 5 pour une croûte de pain chez HK (j'en avais acheté pour le CNCardinal et il m'en restait donc 4 en rab). Il faut couper une des pattes de fixation du servo et utiliser un palonnier en croix et deux petites vis (qui viennent du sachet d'accessoires du servo).
J'ai utilisé un morceau de jonc de carbone de 4mm pour faire l'axe d'articulation.Il faut re-percer un des deux support de roue avant à 4.2 ou 4.5 pour permettre la rotation libre de celui ci. L'autre support n'est pas modifié et le jonc y rentre à serrage.



La stabilisation est confiée à une carte KK2 reflashée avec la version 1.5 qui permet le vol en mode stable qui est très confortable.
J'ai aussi monté un support pour la Gopro (découpé dans l' "écrin" d'emballage)









Comme on s'amuse beaucoup au club avec les multicoptères en vol de jour et en vol de nuit, surtout à plusieurs, on a décidé (à deux pour le moment) de se construire des multicoptères de combat (le but étant de se toucher, de se pousser etc., mais sans faire de casse onéreuse.)
Comme j'ai acquis récemment une imprimante 3D, j'ai aussi décider de dessiner et d'imprimer un max de pièces pour ce projet. Avec un but précis, c'est la meilleur façon d'apprendre!
Au travail:

L'élément principal du blindage est découpé au fil chaud dans un vieux morceau d'EPP noir (beurk)
Le châssis principal est en bois carré 14x14 en ramin comme pour mon Tcopter car c'est très solide.
Les pièces qui maintiennent le blindage en EPP sur les bras en bois sont dessinées avec FreeCad et imprimées en ABS.



facile... y a qu'a regarder la machine faire (ou plutôt magique!)


Les hélices dans ce cas sont du commerce, mais j'ai pu en imprimer aussi qui fonctionnent :




La bête assemblée !




Pour le moment ,ça vole mais pas bien : je pense que les motéeurs (récupérés de la Gaui) sont un peu faiblards et le comportement en lacet s'en ressent.
J'ai d'autres moteurs à monter mais pas encore trouvé le temps.
Depuis j'ai encore élargi ma gamme de multicoptères avec un micro quad (acheté tout fait chez HobbyGaGa pour 34€ transport compris):

Ce truc est génial : vendu avec sa radio 2.4 qui fonctionne parfaitement et qu'on a bien en mains.
C'est très stable à l'intérieur (plus de 10 minutes d'autonomie) et ça vole parfaitement à l'extérieur, même par vent fort...
On peut faire de belles translations en allant très loin à la limite de la vue, faire de beaux virages inclinés ,
de l'accro : flips avants, arrières et latéraux etc.
J'ai y monté une petite caméra "keychain" à 6$ dont j'ai retiré la coque et l'accu. La caméra est alimentée par l'accu de propulsion. 8 gr supplémentaires mais le vol est toujours aussi convaincant.
Je peux voler et filmer à l'extérieur et à l' intérieur.
Ci dessous une vidéo réalisée à l'intérieur, il y a quinze jours lors de notre rencontre annuelle "des givré"
Hum... elle était bonne la choucroute garnie offerte à tous les pilotes par le club....
A l'année prochaine.
J'ai aussi équipé le microquad d'un µFPV (3gr) mais l'émetteur 5.8 Ghz a du être renvoyé au fournisseur car il ne fonctionnait pas correctement.
Comme maintenant pas mal de modéliste de notre club se sont aussi procuré un Ubsan X4, on en profite pour faire du combat indoor dans le club-house lorsqu'il ne fait pas bon...

avec des protections imprimées 3D, c'est mieux pour les hélices...





J'ai aussi acheté un micro Scorpion Y6 de Walkera :

J'y ai monté une micro camera FPV.
Je l'avais acheté "bind and fly" donc sans radio, mais j'ai été fort déçu car pas moyen de la binder sur mon module spectrum (sur radio X9 chinoise) que j'utilise entre autres avec mon Blade MCPX BL.
En consultant les forums, j'ai appris que le système bind and fly de Walkera n'était pas compatible avec le BNF (Bind N Fly) de spectrum/ Eflite etc...
Mais j'ai trouvé un module qui permet de piloter les jouets Walquera avec un smartphone ou en le branchant sur la prise écolage d'une radio classique.:

En m'inspirant d'une modif vue sur un forum sur le net, j'ai fabriqué un module compatible Walkera pour installer sur ma radio chinoise :
J'ai démonté le bidule, supprimé la petite lipo, le connecteur jack,et réalisé quelques soudures.
J'ai récupéré le boîtier ainsi que la partie alim5V du module d'émission qui était fourni avec la radio turnigy 9X et dont je n'avais aucun usage
Avec tout ça j'ai pu réaliser un module compatible avec les jouets Walkera utilisable avec ma radio chinoise :
l'électronique du "Magicbox" est donc maintenant directement alimenté par la radio et s'enfiche à la place prévue pour les modules de tout genre.
le connecteur et le régulateur 5V du module Turnigy sont sur un petit CI séparé que j'ai pu réinstaller à sa place dans le boîtier du module.
l'intérieur du Magicbox est installé dans la partie supérieure du boîtier, je conserve les deux couvercles, je récupère le guide lumière pour les deux leds supérieures (les deux autres ne sont plus d'aucune utilité) et j'installe ce guide lumière dans le couvercle du module tuirnigy.

ci-dessus, le guide lumière pour les deux indicateurs led du Magicbiox installé dans le couvercle du module Turnigy.

Plus de détails sur cette bidouille sur ma page suivante:
Le Grand Scorpion Y6 vole toujours très bien (même mieux avec la KK2 et surtout le denier firm 1.6++.
Quelques vidéos réalisées avec la Gopro montée sous celui-ci :
Mini casier à décollage et atterrissage vertical:

Ça va faire vingt ans que je fais voler des casiers de bière de différentes tailles, thermiques et électriques.
Ça fait aussi vingt ans que je réussi (presque toujours) à les faire décoller verticalement...
Par contre ça fait vingt ans que j'essaye de les faire atterrir verticalement, mais là c'est bien plus difficile!
Avec l'arrivée des cartes électronique de stabilisation, j'ai voulu tester.
J'ai donc réalisé un modèle échelle 1/1 avec une carte KK2.
Il a fallu bidouiller pas mal pour réaliser les réglages de la carte (pour adapter le programme monocoptère à ma configuration particulière à 3 servos) et de la radio chinoise pour passer en vol de la config multicoptère à la config avion...(les ailerons deviennent dérive et vice-versa en même temps que la stabilisation passe du mode gyro + accéléromètres au mode gyro seul en configuration avion).

L'hélice est maintenant derrière le moteur, l'accu est en première position et la carte KK2 est derrière l'hélice...


Avec un vent faible le décollage, le stationnaire et l'atterro vertical fonctionne bien.
Les essais que j'ai pu faire au terrain ont toujours été fait avec un vent assez soutenu, et le vol en phase avion étaient plus délicats qu'avec mes modèles sans électronique (le centrage est aussi plus arrière)
L'atterrissage vertical est très difficile avec le vent car il y a beaucoup plus de surface latérale que sur un multicoptère et il faut pencher très fort pour ne pas être entraîné en translation par le vent.
Donc pas terrible : je suis un peu déçu.
J'ai aussi utilisé le T copter pour faire des vidéos avec la Gopro et ça fonctionne très bien.
Le seul souci c'est qu'on voit sur les vidéos que ça balance un peu latéralement dans certaines phases de vol.
J'ai donc refait le même mais en plus grand :

La gopro est emballée dans un support coupé au fil chaud dans de l'EPP (fichiers disponibles)
Et tant qu'a faire j'y ai installé le matériel FPV que j'avais sur un ancien quadri

C'est très stable tout en restant très manoeuvrant.

Voici les dimensions, le reste est identique au premier Tcoptère

Les moteurs sont des CF2822, et ils sont attachés avec des colliers Colson , le système d'articulation dérivé des supports de roue avant a été imprimé sur mesure en ABS avec mon imprimante 3D (fichiers à disposition pour qui veut).

Idem pour les moteurs des bras avant.
Sur ma lancée j'ai encore pondu une autre version : les tricoptères c'est plus agréable à piloter, plus manoeuvrant et bien plus facile à voir même lorsqu'on va loin que les quadris, Mais l'articulation de la queue avec un petit servo est relativement fragile (sil la machine se crache et tombe mal il y a risque de casse des pignons du servo.
Le Acopter
J'avais vu qu'il y avait maintenant des quadris avec queue en V, j'ai réalisé un truc dans le genre mais en inversant le "V" ça permet du faire un support moteur plus petit, en ayant pas les hélices qui dépassent sur le dessous et c'est à mon goût plus esthétique:

Pour la taille, cette fois c'est 500mm :



J'ai aussi utilisé deux bouteilles de Perier et j'ai réalisé des moignons d'aile en plastique transparent (plastique pour machine à plastifier utilisé sans mettre de papier entre les deux couches.
Ça vole super....
Et j'ai encore des idées sur d'autres engins dérivés de multicoptères...
Donc...